
19°C 28°C
Luziânia, GO



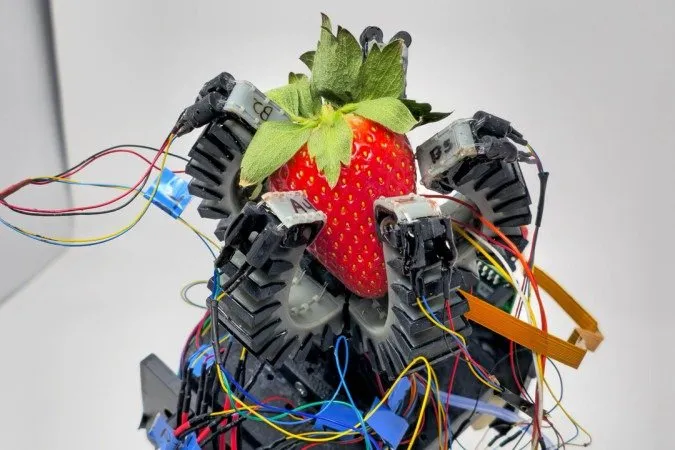
Pesquisadores da Universidade Cornell (em Ithaca, no estado americano de Nova York) desenvolveram uma garra robótica flexível capaz de identificar o ponto ideal da maturação de frutas delicadas, como morangos, por meio do tato, e colhê-las sem causar danos. O dispositivo utiliza sensores de fibra óptica extensíveis para medir características físicas da fruta, como rigidez e deformação. A partir desses dados, o sistema consegue estimar se o fruto está maduro e aplicar a força adequada para removê-lo com segurança.

Novos robôs ampliam disputa na cirurgia robótica no Brasil
6 tecnologias antigas que intrigam a ciência moderna (e ainda são difíceis de replicar)
A tecnologia foi criada no laboratório de Rob Shepherd, professor de engenharia mecânica e aeroespacial. Além de diminuir as perdas na colheita, a inovação pode contribuir para sistemas agrícolas mais sustentáveis e eficientes, ampliando a produção de frutas sensíveis que apresentam maior dificuldade de cultivo e manejo.
Para treinar o sistema, os pesquisadores estabeleceram uma colaboração com Marvin Pritts, especialista em horticultura e desenvolvimento global na mesma universidade. A equipe percebeu a necessidade de um modelo confiável para testar a força de preensão da garra robótica e escolheu os morangos como referência. A escolha se deve ao fato de que o grau de maturação do morango pode ser determinado visualmente com alta precisão, principalmente pela cor. Isso permitiu aos cientistas correlacionar dados táteis com um parâmetro visual confiável.





